RoomRanger
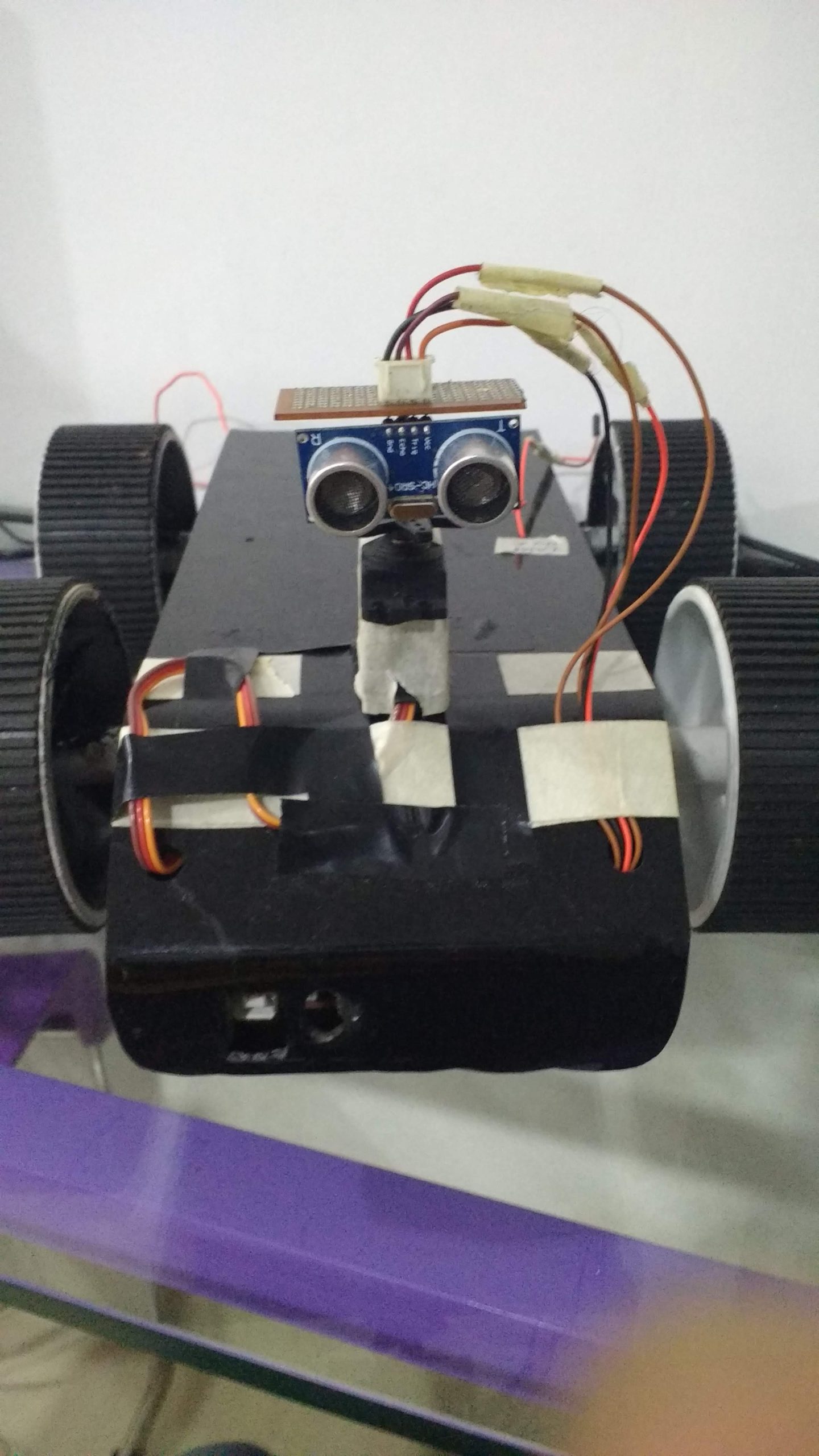
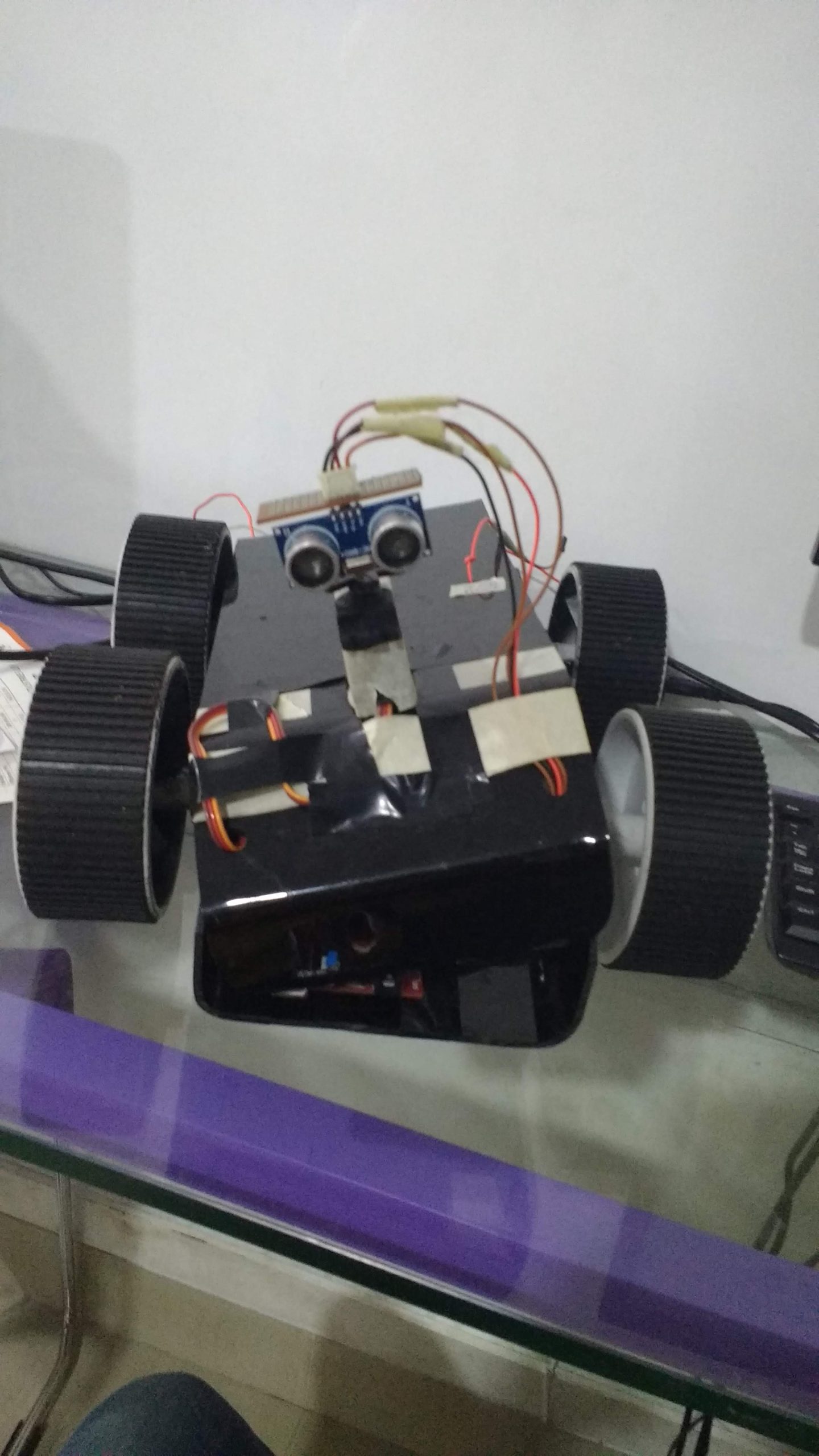
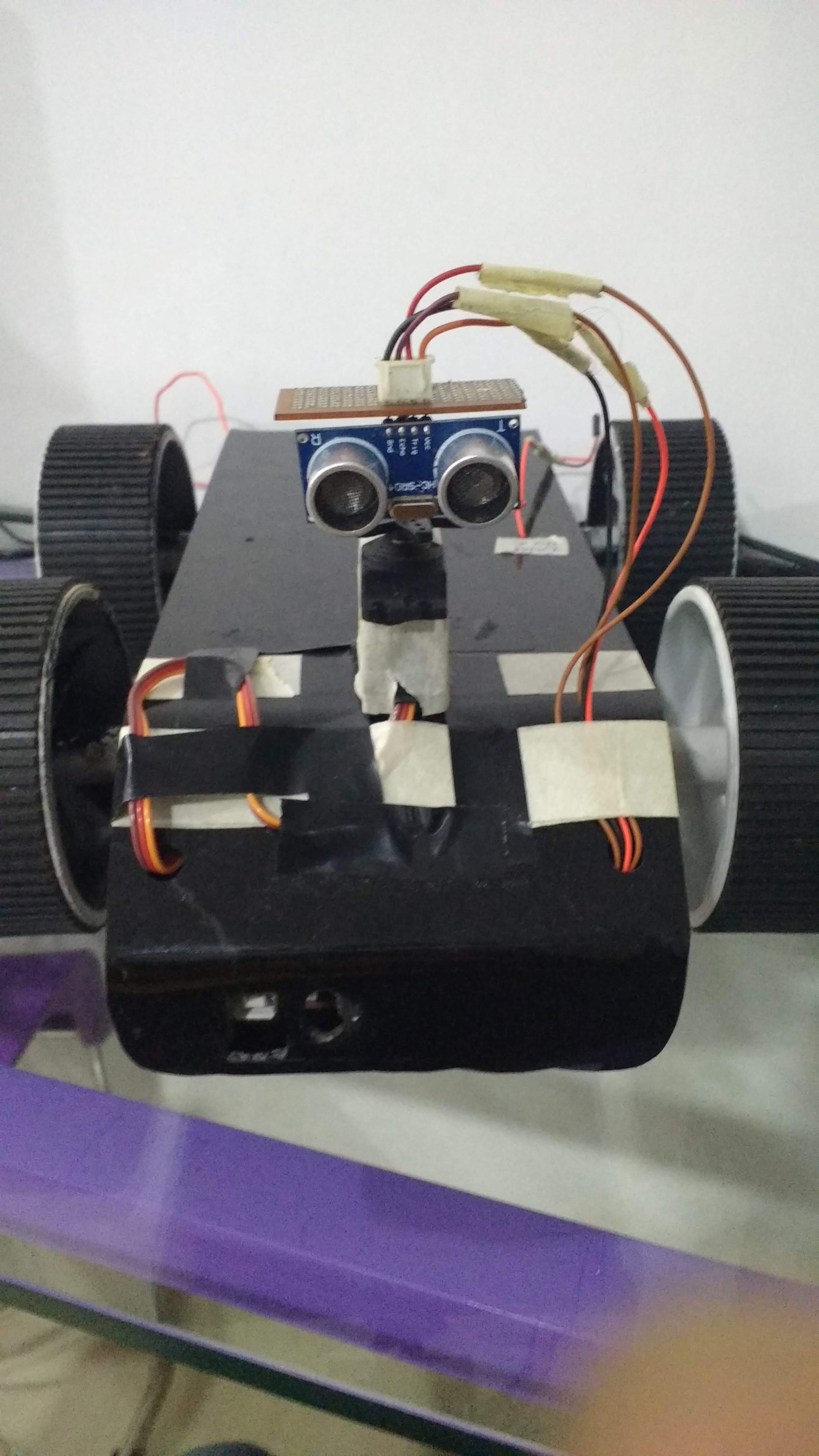
A compact robotics system designed to autonomously explore and map indoor environments. RoomRanger uses ultrasonic distance sensors and an Arduino Mega as its control unit to perform obstacle detection and collision-free navigation. The robot builds a 2D room map in real time while continuously localizing itself. Designed as a foundation for future SLAM-based enhancements and smart home robotics.
Technologies Used:
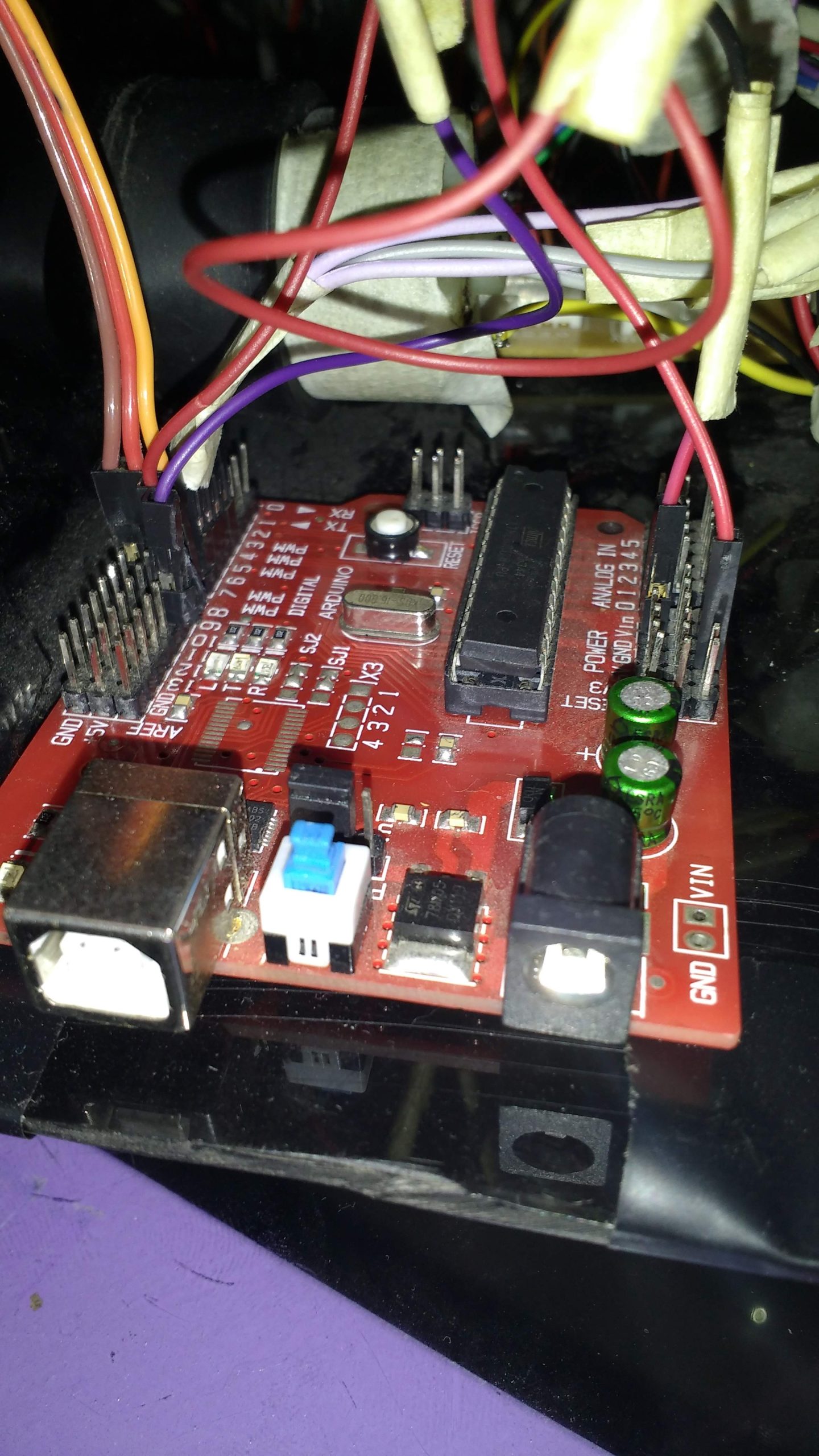
Processing Unit: Arduino Mega 2560
Motor Control: L298N Motor Driver (with DC Geared Motors)
Sensors: Ultrasonic Distance Sensors (HC-SR04)
Software: Arduino C/C++ (Navigation & Control Logic), Serial Data Logging (Processing/Python for mapping visualization)
Navigation & Mapping: Obstacle Avoidance, Dead-Reckoning, Occupancy Grid Map Generation (basic SLAM foundation)